论文阅读:SFT Memorizes, RL Generalizes
Original Paper: [2501.17161] SFT Memorizes, RL Generalizes: A Comparative Study of Foundation Model Post-training
Introduction
Memorization and Generalization in LLM/VLM: Memorization can manifest as the model memorizing the training data, while generalization reflects the divergence between the model’s output distribution and the pre-training data distribution.
Scaling up Inference-Time Compute: Recent works demonstrate that fine-tuning verifiers during inference improves model accuracy. In addition, “scaling laws” for inference-time compute is revealed.
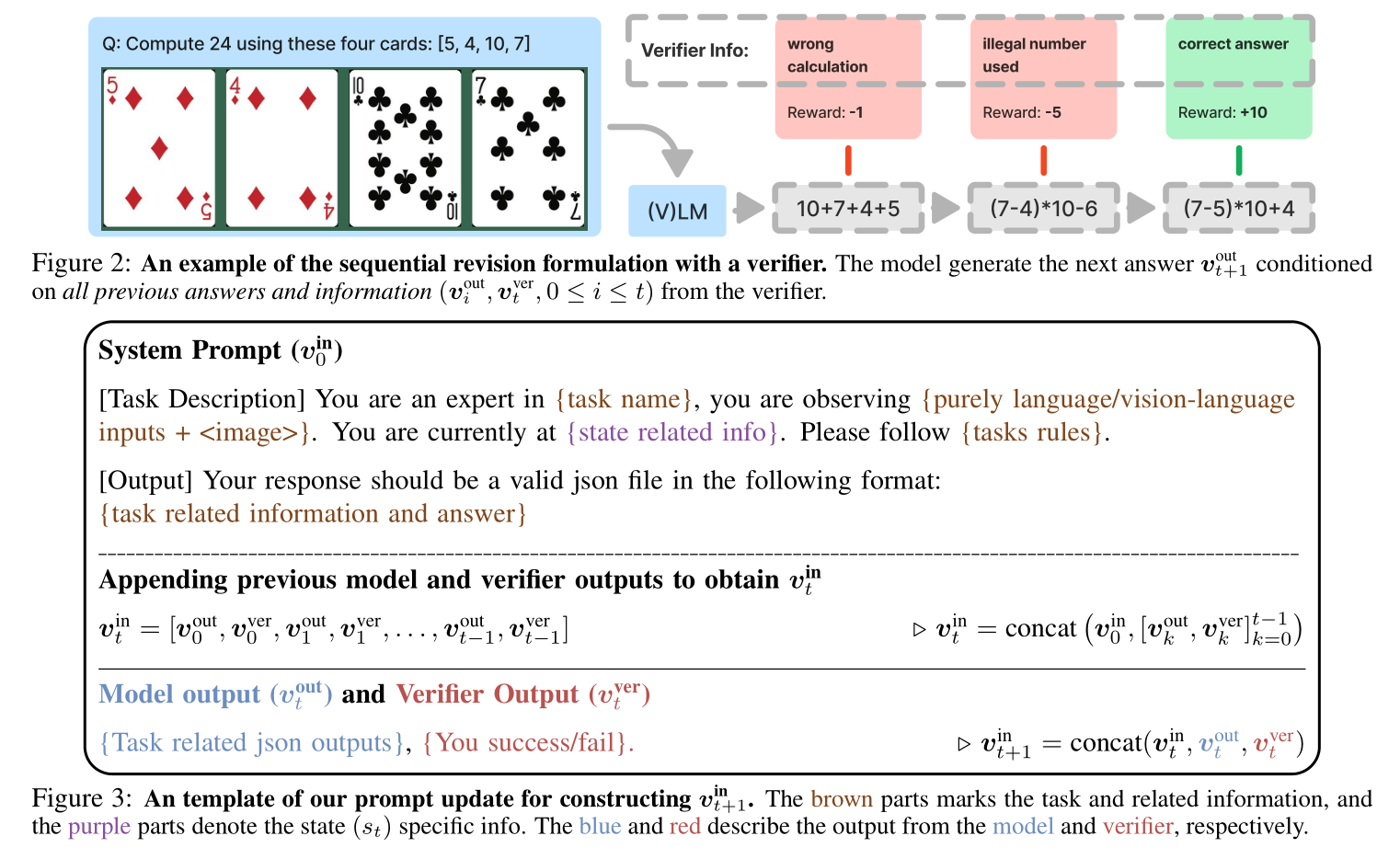
- We integrate inference-time verification into a multi-turn RL formulation.
- We examine the impact of inference-time verification on RL generalization.
在 RL 中使用 verifier,且发现增加推理时间/计算能显著提升泛化性。
Evaluation Tasks
The Generalization Points Environment: This task is designed to evaluate generalization of arithmetic reasoning.
- State: Each state of the environment contains $4$ cards, described as text (in the GP-L variant) or presented as an image (in the GP-VL variant)
- Goal: The goal is to produce an equation that equals to a target number ($24$ by default).
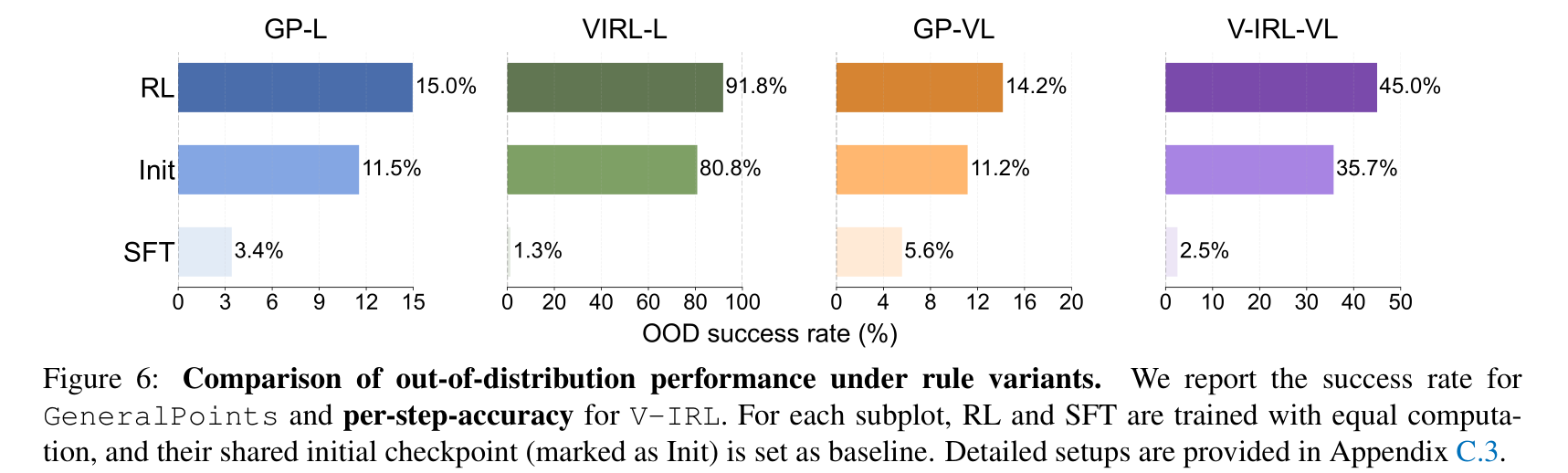
- Rule Variations: We introduce rule variations to study whether the model learns or simply memorizes. These variations consist of interpreting the symbols ‘J’, ‘Q’, and ‘K’ either as ‘11’, ‘12’, and ‘13’ respectively, or all as the same number ‘10’. We post-train the model using one rule, and evaluate using a different rule.
- Visual Variations: Since the major visual challenge is to recognize the number of each card, agnostic to the color of the cards. We train the model using cards of one color, then test OOD performance using the other color.
The V-IRL Environment: We utilize the V-IRL environment to study spatial reasoning ability in an open-world navigation domain. We consider two versions of the environment, one (V-IRL-L) consists of pure language description, and another (V-IRL-VL) that includes vision-language input.
- Rule Variations: We consider two distinct action space. The first variant utilizes an absolute orientation action space, which includes ‘north’, ‘northest’,… The second variant employs a relative orientation action space containing ‘left’, ‘right’, ‘slightly left’ …
- Visual Variations: The key visual challenge is to recognize landmarks from the visual observations. So we evaluate its performance in different locations.

Results
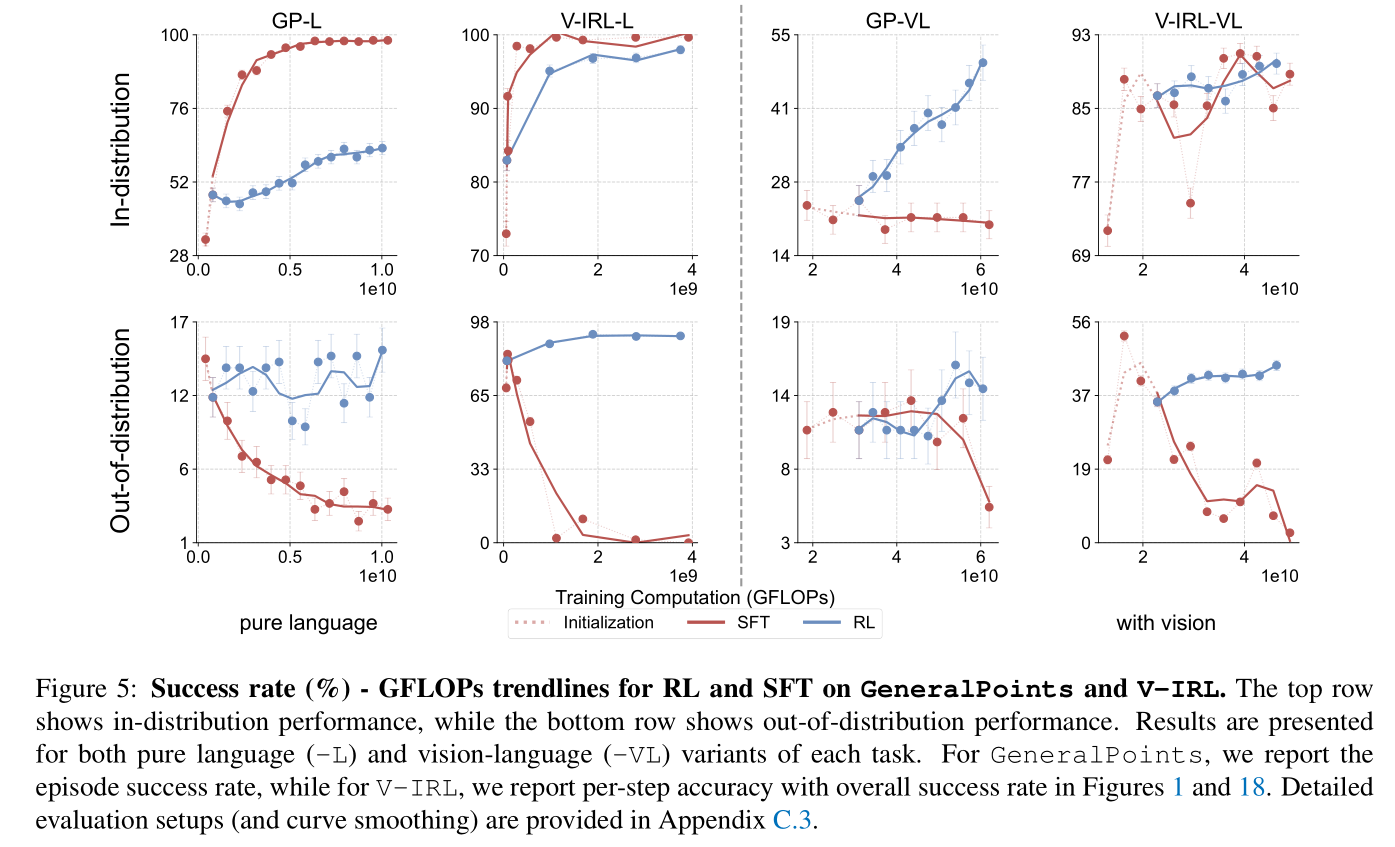
Experimental Setup: We evaluate on GeneralPoints and V-IRL, each of which has a pure language (-L) and a vision-language (-VL) variant. We consider the results on in-distribution (ID) and out-of-distribution (OOD) generalization.
GeneralPoints: The ID case treats all ‘J’, ‘Q’, ‘K’ as 10, and the OOD cases interprets them as 11, 12, and 13.V-IRL: The ID case adopts the absolute orientation, and the OOD case uses the relative orientation.
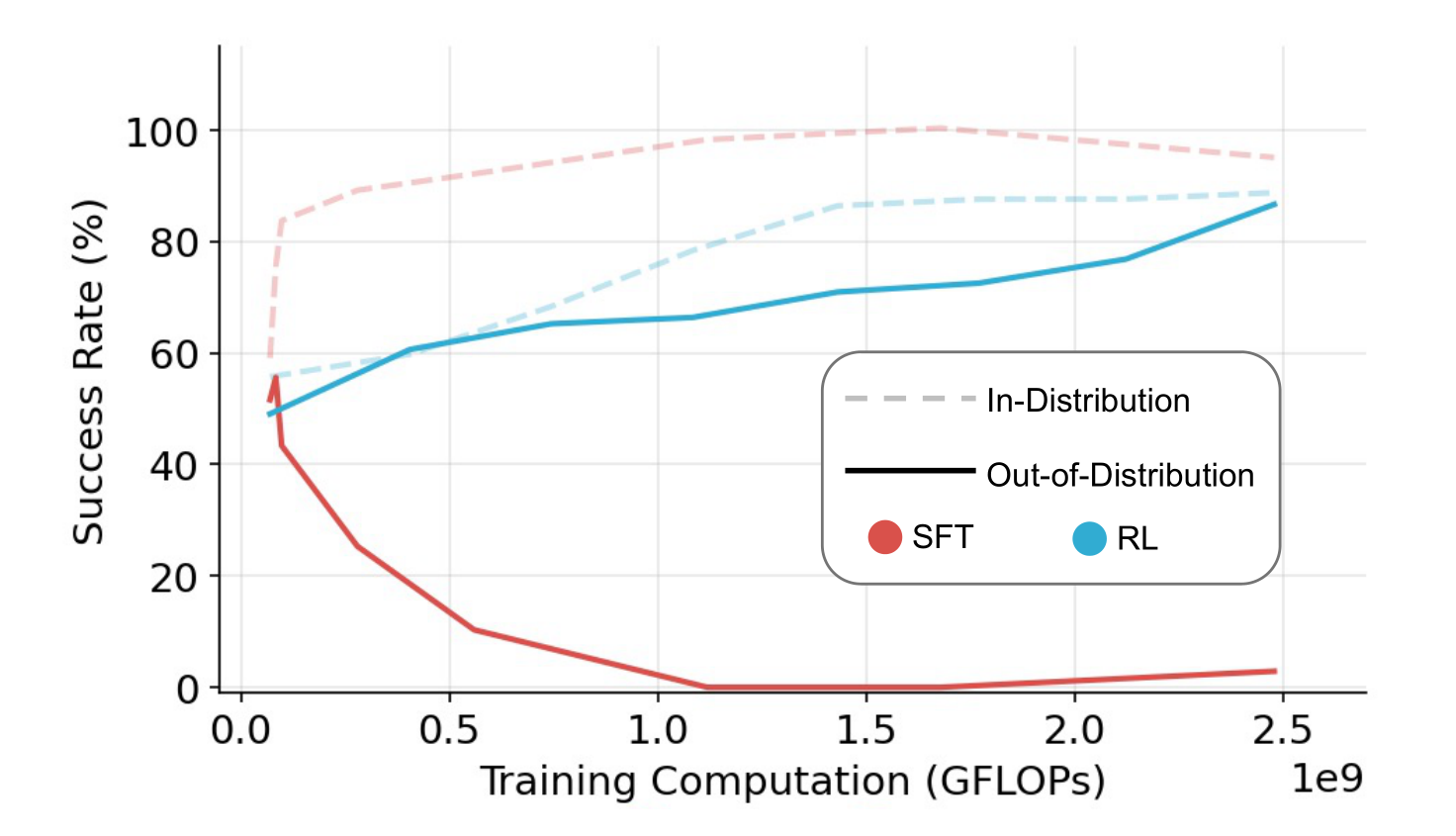
RL Generalizes, SFT Memorizes: As shown in the figures, RL consistently improves OOD performance on all tasks. In contrast, SFT consistently exhibits performance degradation across all OOD evaluations on all tasks.
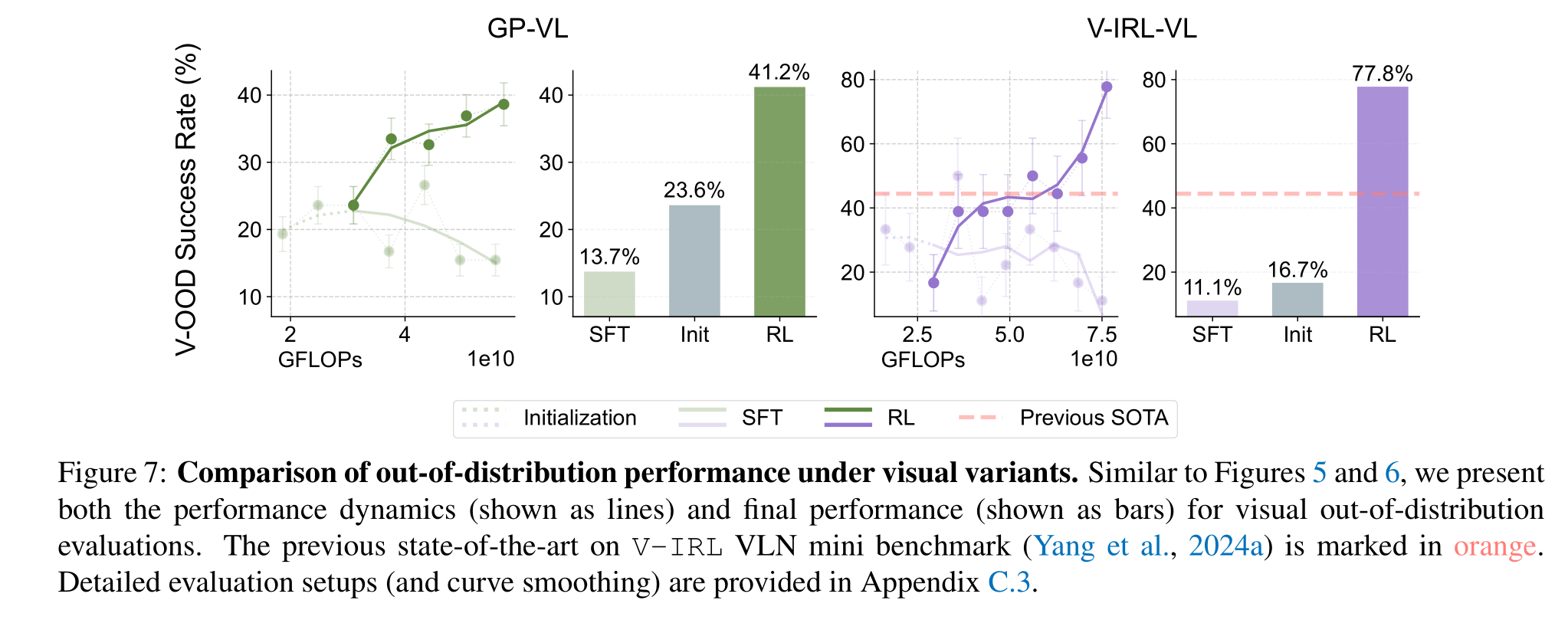
RL Generalizes in Visual OOD Tasks:
GeneralPoints: We train the VLM using the black suits and test the OOD performance on the red suits.V-IRL: We train the model on routes collected in New York City and evaluate it on the originalV-IRL VLN mini benchmark (containing routes from various cities world-wide).
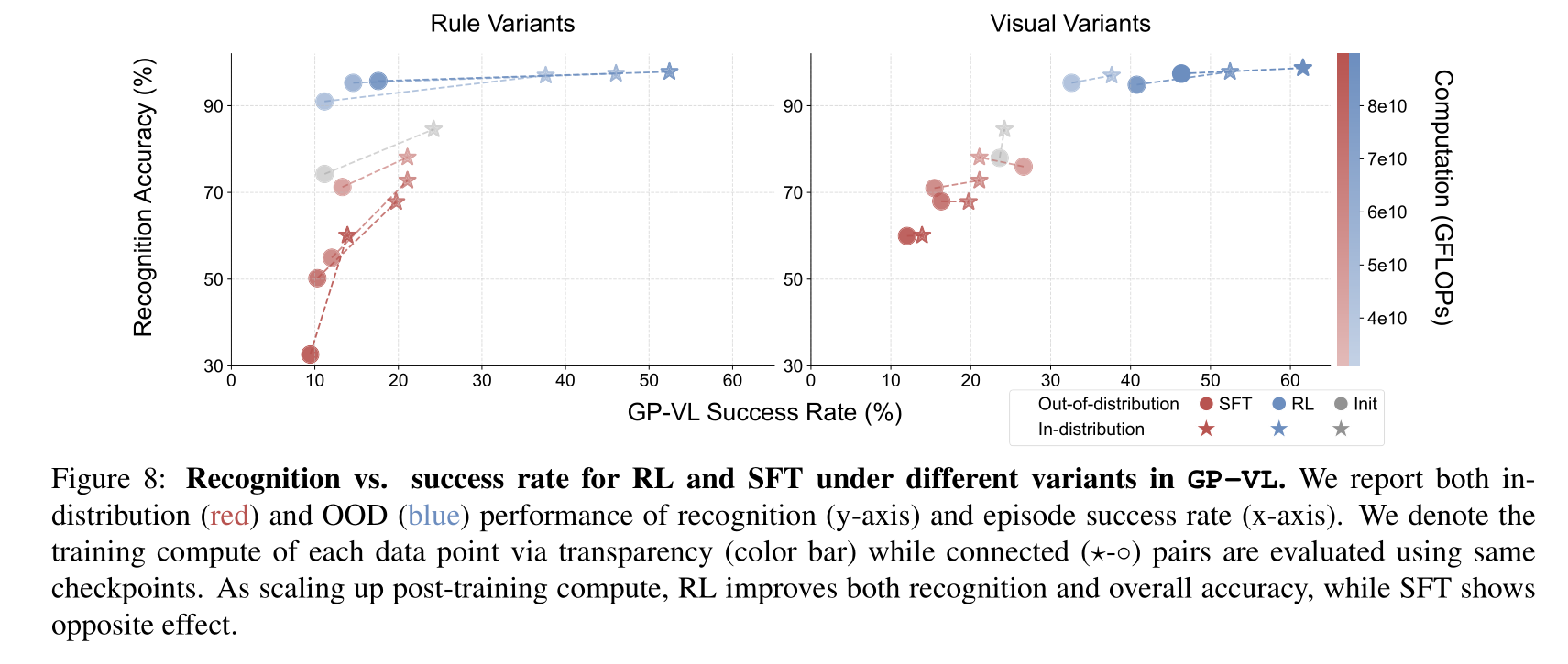
Scaling RL Improves Visual Recognition Accuracy in VLM Training: We observe that VLM’s visual recognition accuracy largely affects the overall performance. In addition, scaling up RL compute also improves visual recognition accuracy.
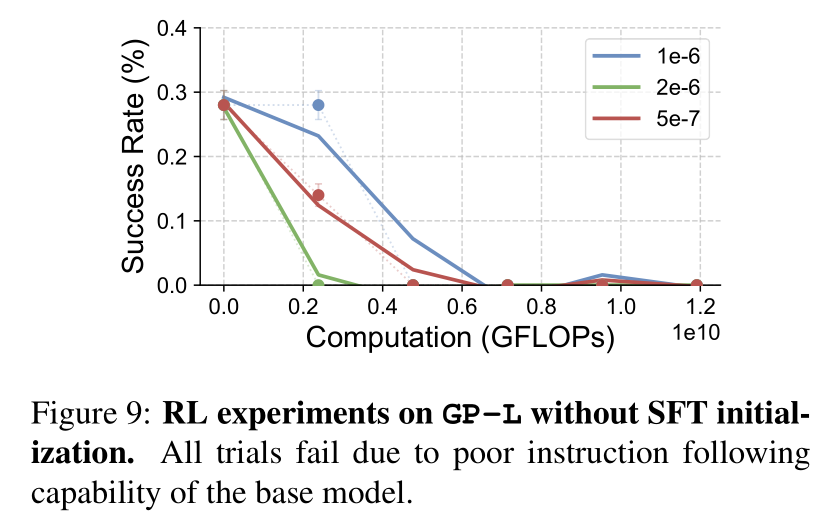
SFT is Necessary for RL Training when the Backbone Model Does not Follow Instructions: The figure shows that without SFT, all end-to-end RL runs fail to improve. We observe that without SFT, the base model suffers from poor instruction following capability.
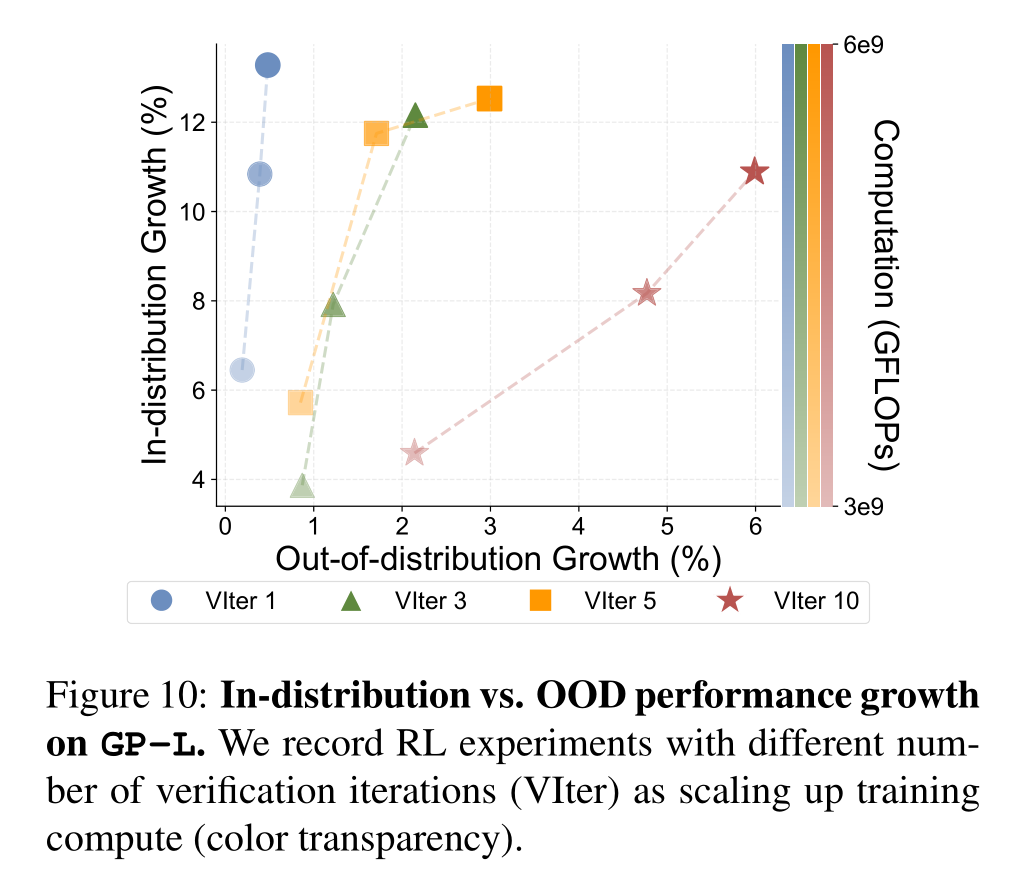
Scaling up Verification Improves Generalization: We observe that RL generalizes better with more verification steps.